读论文系列·SSD
转载请注明作者:梦里茶
Single Shot MultiBox Detector
Introduction
一句话概括:SSD就是关于类别的多尺度RPN网络
基本思路:
- 基础网络后接多层feature map
- 多层feature map分别对应不同尺度的固定anchor
- 回归所有anchor对应的class和bounding box
Model
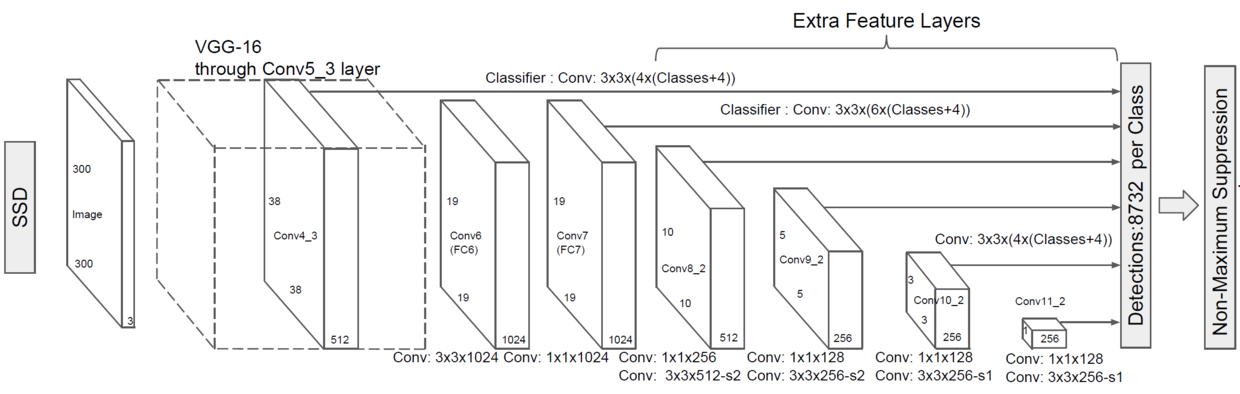
- 输入:300x300
- 经过VGG-16(只到conv4_3这一层)
- 经过几层卷积,得到多层尺寸逐渐减小的feature map
每层feature map分别做3x3卷积,每个feature map cell(又称slide window)对应k个类别和4个bounding box offset,同时对应原图中6(或4)个anchor(又称default box)
- 38x38, 最后3x3, 1x1三个feature map的每个feature map cell只对应4个anchor,分别为宽高比: 1:1两种,1:2, 2:1两种,因此总共有 38 x 38 x 4 + 19 x 19 x 6 + 10 x 10 x 6 + 5 x 5 x 6 + 3 x 3 x 4 + 1 x 1 x 4 = 8732 个anchor
- 其他feature map的feature map cell对应6个anchor,分别为宽高比: 1:1两种,1:2, 2:1两种,1:3, 3:1两种
每层的feature map cell对应的anchor计算方法如下
- 位置:假设当前feature map cell是位于第i行,第j列,则anchor的中心为 , 是第k层feature map的size(比如38)
- 缩放因子:

其中为0.2,为0.9,m为添加的feature map的层数,缩放因子就是为不同feature map选择不同的大小的anchor,要求小的feature map对应的anchor尽量大,因为越小的feature map,其feature map cell的感受野就越大
anchor宽高:


其中,,可以理解为在缩放因子选择好anchor尺寸后,用来控制anchor形状,从而得到多尺度的各种anchor,当时,增加一种,于是每个feature map cell通常对应6种anchor。
- 网络的训练目标就是,回归各个anchor对应的类别和位置
Training
样本
- 正样本 选择与bounding box jaccard overlap(两张图的交集/并集)大于0.5的anchor作为正样本
- 样本比例 Hard negative mining:由于负样本很多,需要去掉一部分负样本,先整图经过网络,根据每个anchor的最高类置信度进行排序,选择置信度靠前的样本,这样筛选出来的负样本也会更难识别,并且最终正负样本比例大概是1:3
Loss
还是一如既往的location loss + classification loss,并为location loss添加了系数α(然而实际上α=1)进行平衡,并在batch维度进行平均

- 是的集合,用于判断第i个anchor是否是第j个bounding box上的p类样本
- 是的集合,是第i个anchor预测为第p类的概率
- l是预测的bounding box集合
- g是ground true bounding box集合
其中定位loss与faster rcnn相同
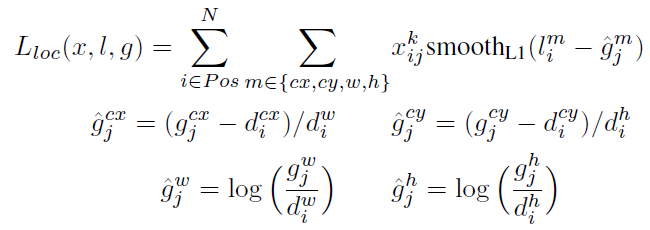 这个式子里的k不是很明确,其实想表达不算背景0类的意思,且前景类只为match的类算location loss
这个式子里的k不是很明确,其实想表达不算背景0类的意思,且前景类只为match的类算location loss
分类loss就是很常用的softmax交叉熵了

核心的内容到这里就讲完了,其实跟YOLO和faster rcnn也很像,是一个用anchor box充当固定的proposal的rpn,并且用多尺度的anchor来适应多种尺度和形状的目标对象。
Detail
在训练中还用到了data augmentation(数据增强/扩充),每张图片多是由下列三种方法之一随机采样而来
- 使用整图
- crop图片上的一部分,crop出来的min面积为0.1,0.3,0.5,0.7,0.9
- 完全随机地crop
然后这些图片会被resize到固定的大小,随机水平翻转,加入一些图像上的噪声,详情可以参考另一篇论文:
Some improvements on deep convolutional neural network based image classification
从切除实验中,可以看到data augmentaion是很重要的(从65.6到71.6)
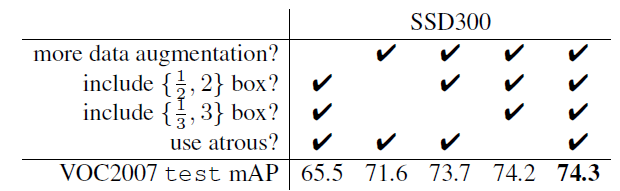 这个表中还提到了atrous,其实是指空洞卷积,是图像分割(deeplab)领域首先提出的一个卷积层改进,主要是能让测试速度更快。具体可以参考 ICLR2015 Deeplab
这个表中还提到了atrous,其实是指空洞卷积,是图像分割(deeplab)领域首先提出的一个卷积层改进,主要是能让测试速度更快。具体可以参考 ICLR2015 Deeplab
从这个表中也可以看出多种形状的anchor可以提升准确率
Result
输入尺寸为300x300,batch size为8的SSD300可以做到实时(59FPS)且准确(74.3% mAP)的测试
Summary
SSD算是一个改进性的东西,站在Faster RCNN的肩膀上达到了实时且准确的检测